1 Обзор
Беспилотный летательный аппарат (БПЛА) HW-V210A в качестве платформы вертикального взлета и посадки (VTOL) Летающая платформа БПЛА может похвастаться чертами как самолетов с неподвижным крылом, так и самолетов с несколькими роторами, то есть большой выносливостью и большим радиусом управления первого и легким взлетом. и посадка и низкие требования к сайтам последнего. Интегрированный с несколькими полезными нагрузками, БПЛА HW-V210A может выполнять задачи захвата HD-видео и обратной передачи в реальном времени. Он широко используется во многих областях, включая обнаружение опасностей, техническое расследование, пограничное патрулирование, поиск и спасание, поиск людей, мониторинг тротуаров и ликвидацию последствий землетрясений, и решает многие проблемы обычных самолетов с неподвижным крылом, такие как трудности при взлете и посадке и сложный взлет. и десантные операции в результате ограничений местности, в том числе в лесу, в горах и на борту.
2 Компоненты системы и технические индикаторы
Гибридный БПЛА с вертикальным взлетом и посадкой HW-V210A в основном состоит из подсистемы платформы самолета, подсистемы нагрузки, подсистемы измерения, управления и передачи информации и подсистемы наземного обеспечения. См. Диаграмму системы на Рисунке 1.
Рис.1.Системная схема БПЛА с вертикальным взлетом и посадкой.
2.1 Основные технические показатели системы
1) Крейсерская скорость: 80-110км / ч;
2) Выносливость: ≥4 ч (нагрузка 2 кг);
3) Практический потолок: ≥3500м;
4) Рейтинг сопротивления ветра: 5;
5) Максимальная полезная нагрузка: 5 кг;
6) Максимальный взлетный вес: 27,5 кг;
7) Время развертывания конфигурации: 20мин.
2.2 Подсистема платформы самолета
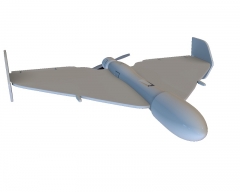
Платформа самолета имеет перевернутую V-образную форму хвоста вертикального взлета и посадки. Два опорных рычага ротора равномерно распределены под крыльями с обеих сторон. На следующем рисунке показан контур платформы самолета.

Рисунок 2 Внешний вид платформы самолета
2.2.1 Основные параметры схемы
➢ Размах крыла: 3,6 м;
➢ Длина самолета: 2,0 м;
➢ Высота самолета: 0,3м.
2.2.2 Строение тела
В конструкции БПЛА в основном используется сотовая конструкция из углеродного волокна / стеклопластика, которая отличается высокой прочностью, ударопрочностью и простотой обслуживания. В настоящее время это основной композитный материал, используемый для легких БПЛА.
Фюзеляж выполнен из углеродного волокна, с тремя крышками люков из стеклопласта, установленными на верхней части спереди назад для удобства сборки и обслуживания оборудования. На брюхе установлено шасси из углеродного волокна, которое используется в качестве демпфирующего устройства при взлете и посадке. Фюзеляж спроектирован с установочной пластиной аккумуляторной батареи и установочной пластиной оборудования управления полетом внутри, для удобства крепления оборудования и регулировки центра тяжести.
Крыло сделано из сотовых ячеек и соединено с фюзеляжем тремя балками из углеродного волокна, проходящими через фюзеляж. Кроме того, хвосты поддерживаются балками из углеродного волокна. Опоры ротора представляют собой трубы из углеродного волокна, закрепленные на металлических деталях под крылом с помощью болтов. Два конца предназначены для металлических оснований двигателя для крепления роторных двигателей.
После разборки компоненты помещаются в специальный легкий транспортный чемодан, что повышает удобство и безопасность транспортировки.
На рисунке 3 представлена принципиальная схема оборудования БПЛА.
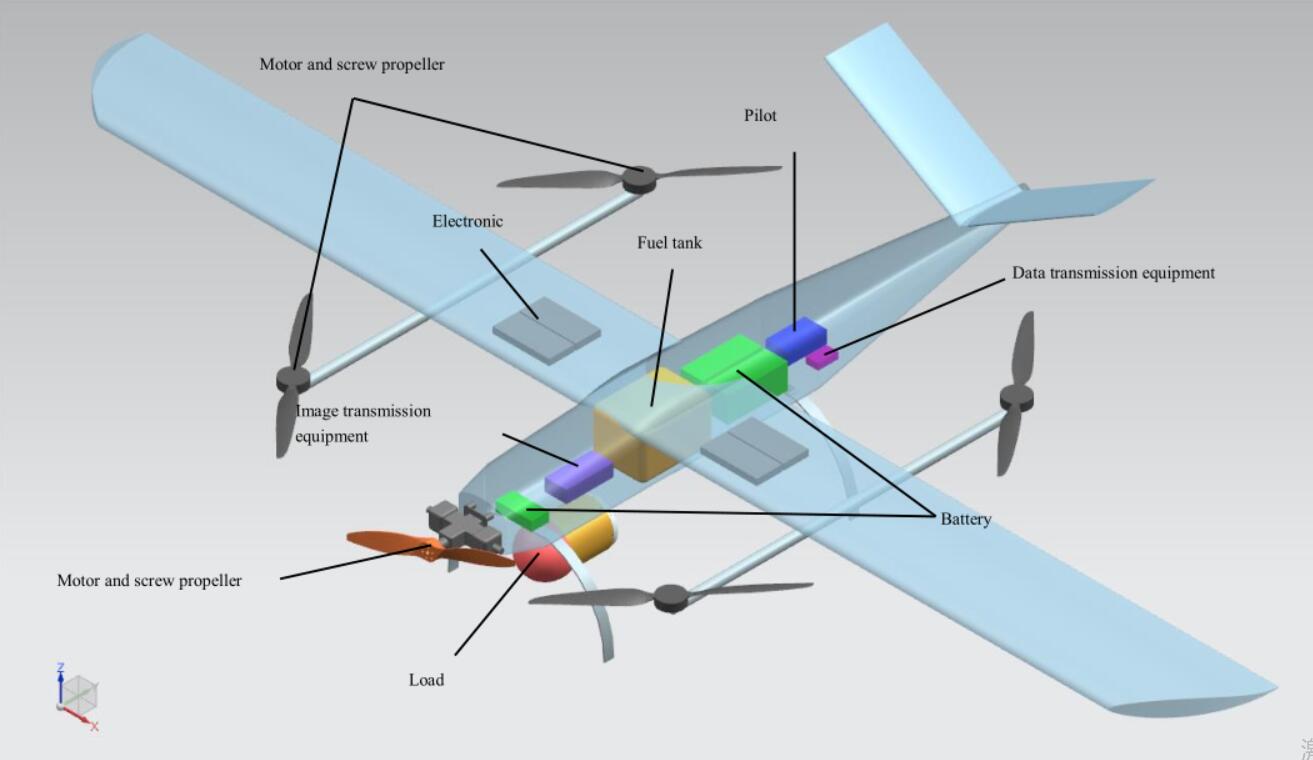
Рисунок 3 Компоновка оборудования БПЛА
2.2.3 Система управления
БПЛА HW-V210A может иметь одновременно винтокрылый и неподвижный режимы полета. Его пилотажно-навигационное оборудование в основном имеет следующие особенности:
➢ Интеллектуальный режим управления полетом: поддержка точного управления вертикальным взлетом и посадкой в других местах, возможность свободного переключения между режимами управления полетом, включая полностью автономный режим, режим повышения устойчивости и режим дистанционного управления через наземную станцию мониторинга, а также возможность автономной работы БПЛА в весь процесс;
➢ Высокоточное измерение движения: измерение местоположения, скорости и положения БПЛА во время полета;
➢ Высокая степень интеграции: высокая степень интеграции, небольшой объем и низкое энергопотребление;
➢ Адаптивность и надежность в суровых условиях: стабильная работа при температуре от -40 ℃ до 60 ℃ и влажности 95%;
➢ Завершение оказания неотложной помощи: разрешите нормальное зависание и посадку при отсутствии сигнала GPS, чтобы обеспечить максимальную безопасность полета.
Аппаратура управления полетом и навигации состоит из автопилота, антенны канала передачи данных, бортовой антенны GPS и т. Д. Антенна GPS и антенна канала передачи данных установлены на верхней поверхности фюзеляжа, что способствует передаче и приему сигналов; автопилот и магнитный компас установлены в задней части кабины для удобства прокладки кабеля; пилотная труба устанавливается перед правым крылышком, чтобы обеспечить правильное измерение скорости полета.
2.2.4 Система питания
Система питания БПЛА состоит из двух частей: системы питания винтокрыла и системы питания неподвижного крыла. Первый обеспечивает подъемную силу для БПЛА во время вертикального взлета и посадки, а второй обеспечивает тяговое усилие во время крейсерского полета.
3.2.3.1 Силовая система винтокрыла
Силовая установка винтового крыла состоит из четырех групп дисковых двигателей, гребных винтов и электронного регулятора скорости. Четыре группы дисковых двигателей и гребных винтов установлены соответственно на четырех основаниях двигателей на двух концах опорного рычага. Электронный регулятор скорости установлен на нижней поверхности рядом с фюзеляжем, а нагревательная панель выступает из основания, что способствует отводу тепла.
3.2.3.2 Система питания неподвижного крыла
Система питания неподвижного крыла состоит из двигателя, винта, топливного бака, топливного насоса, топливопроводов, электростартера, ЭБУ и так далее. Винт установлен с крышкой для выпрямления и защиты. Двигатель и гребной винт устанавливаются на специально изготовленное монтажное основание двигателя, которое может отводить большую часть вибрации двигателя. Схема двигателя представлена на рисунке 4.
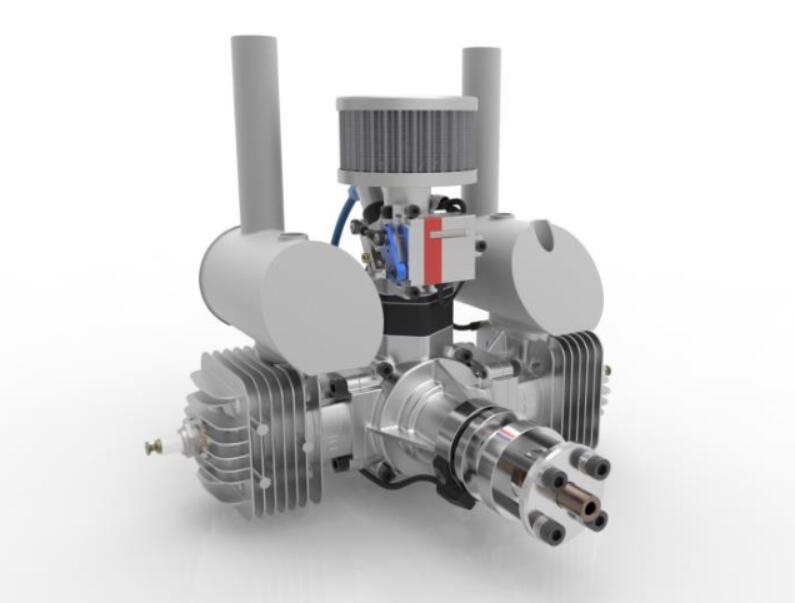
Рисунок 4 Внешний вид двигателя
2.3 Подсистема нагрузки
Фотоэлектрический контейнер и другие грузы можно переносить в соответствии с потребностями задачи. Фотоэлектрический блок состоит из двухосевой платформы стабилизации, камеры видимого света, устройства отслеживания изображений и т. Д.
Фотоэлектрический блок имеет следующие особенности:
➢ Предоставление видимых видеоизображений высокой четкости;
➢ Поиск и наблюдение за целями на земле, в море и в небе;
➢ Стабилизируйте визуальную ось на носителе движения;
➢ Разрешить ручное управление перемещением линии прицеливания, определять местонахождение цели и автоматически отслеживать ее;
➢ Вывести информацию о состоянии подсистемы через интерфейс связи;
Индикаторы фотоэлектрического стручка представлены ниже:
1) Платформа стабилизации
◆ Тип: двухосная стабилизация;
◆ Диапазон измерения: 360 * n °, диапазон шага: -120º ~ + 90º;
◆ Точность стабилизации: ≤0,2 мрад (1σ);
2) Камера видимого света
◆ Разрешение: 1920 * 1080 (HD);
◆ Рабочий диапазон волн: 0,4 ~ 0,9 мкм;
◆ Оптический зум: 30x;
◆ Расстояние обнаружения: 4 км (цель 3 м * 4 м);
◆ Идентификационное расстояние: 2 км (цель 3 м * 4 м);
3) Неохлаждаемый инфракрасный датчик
◆ Разрешение: 640 * 480;
◆ Размер пикселя: 17 мкм;
◆ Материал детектора: оксид ванадия.
2.4 Подсистема измерения, управления и передачи информации
Подсистема измерения, управления и передачи информации имеет расчетную дальность действия 20 км. Он может обеспечивать передачу информации между БПЛА и землей и выполняет следующие основные функции:
Дистанционное управление / телеметрия системы управления полетом: система управления полетом использует функцию отправки телеметрической информации на наземную станцию управления, а наземная станция управления использует функцию для отправки команд дистанционного управления в систему управления полетом;
Передача изображения: БПЛА использует функцию отправки информации об изображении, полученной системой загрузки, на наземный пульт управления, и информация об изображении записывается и отображается на наземном пульте управления в реальном времени.
Дистанционное управление фотоэлектрическим блоком и телеметрия: функция используется для передачи информации дистанционного управления и телеметрии между фотоэлектрическим блоком и наземной консолью управления.
2.5 Подсистема комплексной поддержки
В транспортном футляре самолета можно безопасно разместить корпус БПЛА с вертикальным взлетом и посадкой. Он может обеспечить безопасность беспилотных летательных аппаратов во время дорожных и воздушных перевозок уровня 1-4, со степенью защиты IP54. Транспортный кейс самолета имеет деревянный корпус с обернутыми краями из алюминиевого сплава и разделительными слоями из пенопласта внутри. Контролируемый размер ящика должен быть меньше 400 × 500 × 2000 мм, а вес - менее 20 кг.
3 Окружающие условия использования и хранения
В случае длительного хранения БПЛА HW-V210A следует хранить в хорошо вентилируемом и сухом месте без кислоты, щелочи или паров, содержащих вредные примеси. Условия окружающей среды в сальниковом ящике должны быть следующими: температура: 5 ℃ 40 ℃, относительная влажность: 30% или ниже, давление воздуха: ниже 110 кПа.
4 Типовые процедуры эксплуатации БПЛА
На примере выполнения разведывательной миссии на рисунке 5 показаны типичные рабочие процедуры БПЛА HW-V210A, включая: составление плана полета, предполетную техническую подготовку, выполнение задач, восстановление и техническое обслуживание. После технического обслуживания БПЛА можно снова использовать для выполнения задач.
(1) Загрузите БПЛА, наземную станцию управления и другие устройства на транспортер. Транспортер перемещается в нужное место согласно требованиям задачи.
(2) Распакуйте и соберите БПЛА, заправьте его топливом, разверните устройства наземной станции управления и сформулируйте планы задач.
(3) Проведите наземное самотестирование БПЛА в режиме онлайн через наземную станцию управления. Когда все будет проверено на нормальное функционирование, выполните предполетную проверку.
(4) После взлета, смонтированного на грузовике, наземная станция управления отслеживает рабочие параметры БПЛА, траекторию полета и информацию об изображении, передаваемую с груза.
((5) После того, как БПЛА летит в указанную воздушную позицию, выполните задачи по разведке, мониторингу и позиционированию цели, включите разведывательное оборудование для поиска цели и отправьте видео на наземную станцию управления для отображения в реальном времени. Когда цель найдена, наземная станция управления отправляет команду отслеживания, и цель будет отслеживаться автоматически.
(6) После посадки и восстановления БПЛА проводятся плановые проверки и соответствующее техническое обслуживание.
Рисунок 5 Типичные рабочие процедуры БПЛА HW-V210A
5 Поддержка и обслуживание
5.1 Техническая поддержка
5.1.1 Поддержка на месте
Техническая поддержка на летной площадке относится к самопроверке наземного оборудования, проверке состояния перед взлетом и простому обслуживанию на месте конструкции кузова восстановленного БПЛА, включая замену аксессуаров оборудования и изнашиваемых деталей, а также другие простые операции по техническому обслуживанию. Фактическое исполнение будет в соответствии с положениями контракта.
5.1.2 Базовая гарантия
Проверка состояния и техническое обслуживание всех систем БПЛА проводятся один раз в год, которые после проверки будут помещены в упаковочные ящики для хранения. Техническое обслуживание базового уровня выполняется профессиональным обслуживающим персоналом. Фактическое исполнение будет в соответствии с положениями контракта.
5.2 Послепродажное обслуживание
Это должно быть выполнено в соответствии с положениями контракта.
5.3 Обучение и материалы
Это должно быть выполнено в соответствии с положениями контракта.
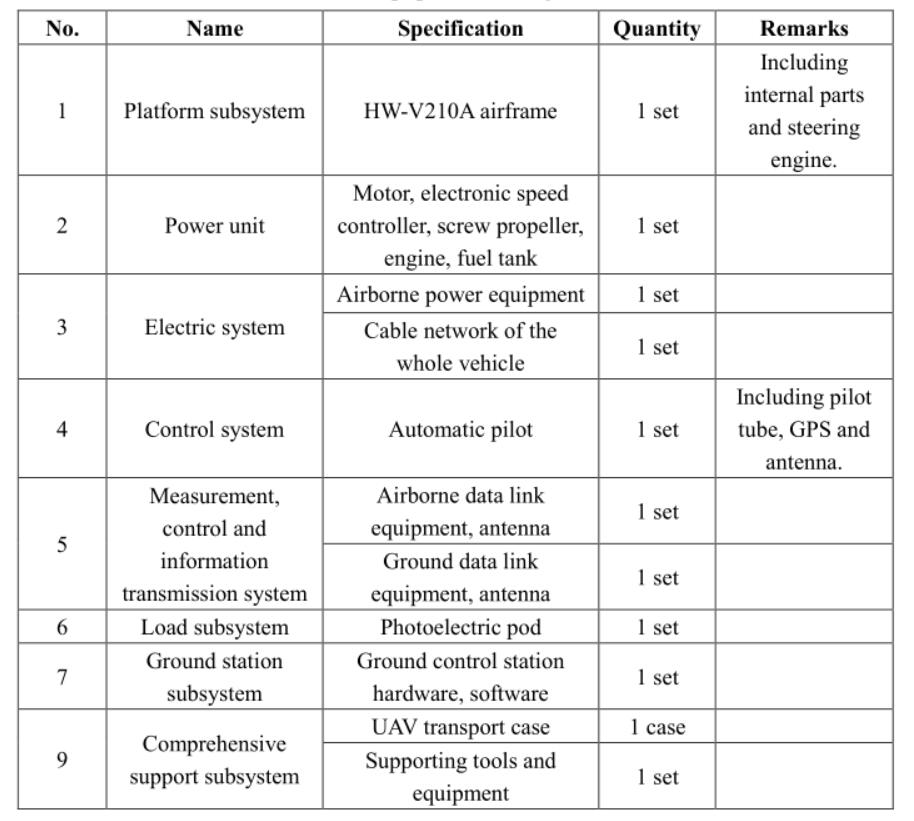
6 Приложение: Перечень конфигурации оборудования
Таблица 3 Список конфигураций оборудования
 Основные технические показатели системы
1) Крейсерская скорость: 80-110км / ч;
Основные технические показатели системы
1) Крейсерская скорость: 80-110км / ч;
2) Выносливость: ≥4 ч (нагрузка 2 кг);
3) Практический потолок: ≥3500м;
4) Рейтинг сопротивления ветра: 5;
5) Максимальная полезная нагрузка: 5 кг;
6) Максимальный взлетный вес: 27,5 кг;
7) Время развертывания конфигурации: 20мин.